
PolicyTrim: Boosting Intrinsic Policy Efficiency of Vision-Language-Action Models
Paper • 2606.22540 • Published • 5
![]()
![]()
![]()
![]()
![]()
Xianghui Wang*, Feng Chen*, Wenbo Zhang, Hua Yan, Zixuan Wang†, Changsheng Li, Yinjie Lei‡
* Equal contribution · † Project lead · ‡ Corresponding author
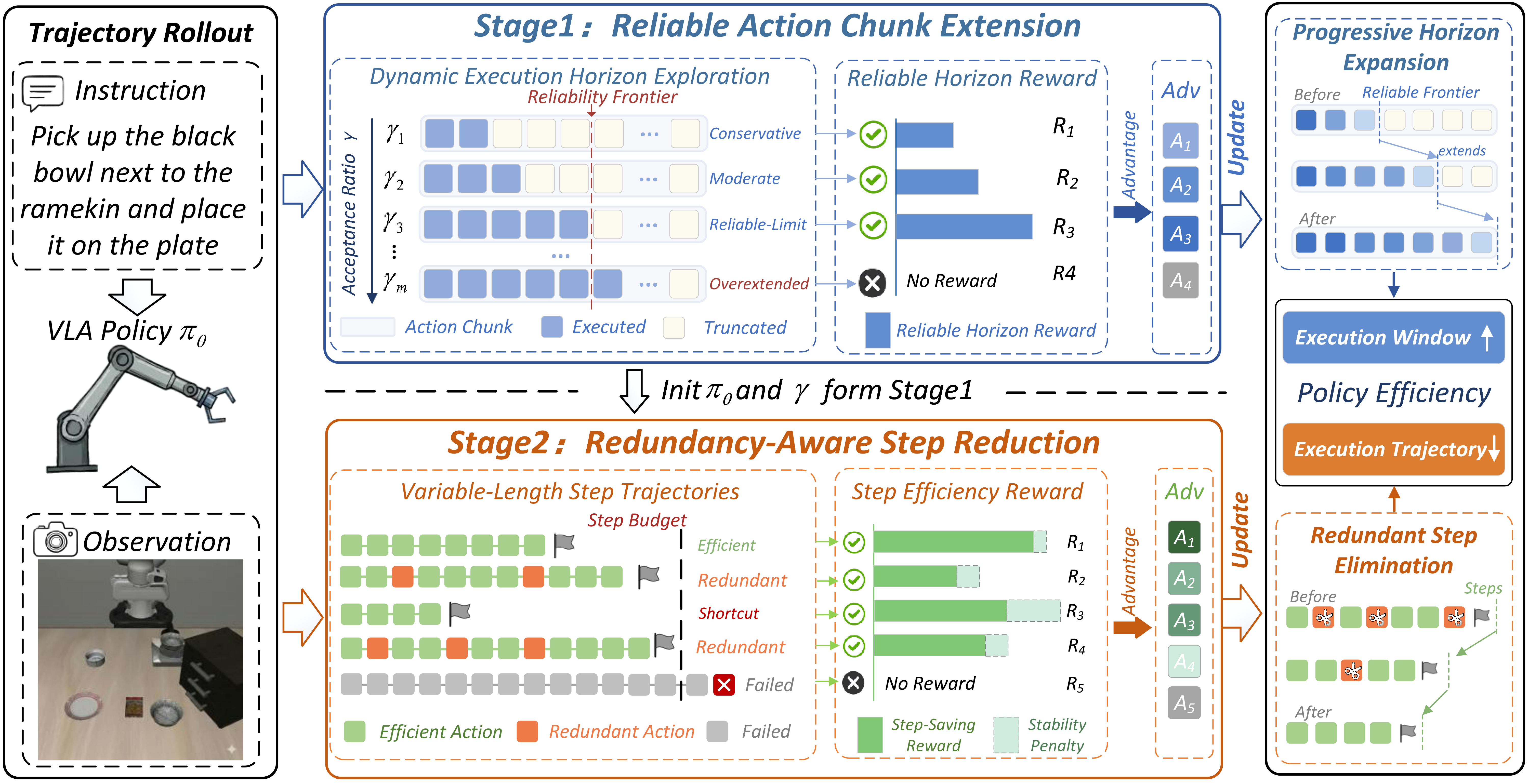
This repository provides the released post-training actor checkpoints for PolicyTrim, a two-stage reinforcement learning framework for improving the intrinsic policy efficiency of Vision-Language-Action (VLA) models.
Most deployment-efficiency methods reduce the latency of each model forward pass. PolicyTrim instead reduces how many inference calls and physical actions are required to finish a task. It targets two policy-level bottlenecks:
PolicyTrim first extends the reliable executable action horizon, then applies a redundancy-aware step-saving objective with stability regularization. Across three benchmarks and three VLA model families, the method reports:
For the method, training code, configuration files, and evaluation scripts, see the PolicyTrim GitHub repository.
Install the Hugging Face Hub CLI:
pip install -U huggingface_hub
Download the complete repository:
hf download INCEPTIONwang/PolicyTrim \
--local-dir ./PolicyTrim-checkpoints
The complete repository is large. To download only one checkpoint, specify its path. For example:
hf download INCEPTIONwang/PolicyTrim \
libero_goal_grpo_openpi_pi05/checkpoints/global_step_500/actor/model_state_dict/full_weights.pt \
--local-dir ./PolicyTrim-checkpoints
Python equivalent:
from huggingface_hub import hf_hub_download
checkpoint_path = hf_hub_download(
repo_id="INCEPTIONwang/PolicyTrim",
filename=(
"libero_goal_grpo_openpi_pi05/checkpoints/global_step_500/"
"actor/model_state_dict/full_weights.pt"
),
)
Checkpoint restoration depends on the matching VLA backend and distributed training configuration. Follow the setup and evaluation instructions in the GitHub README, then point the corresponding PolicyTrim configuration to the downloaded checkpoint.
The released materials are provided under the Apache License 2.0. Users are also responsible for complying with the licenses and terms of the corresponding base VLA models, datasets, and simulation environments.
If you find PolicyTrim useful, please cite:
@inproceedings{policytrim2026,
title = {PolicyTrim: Boosting Intrinsic Policy Efficiency of Vision-Language-Action Models},
author = {Xianghui Wang and Feng Chen and Wenbo Zhang and Hua Yan and Zixuan Wang and Changsheng Li and Yinjie Lei},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2026}
}